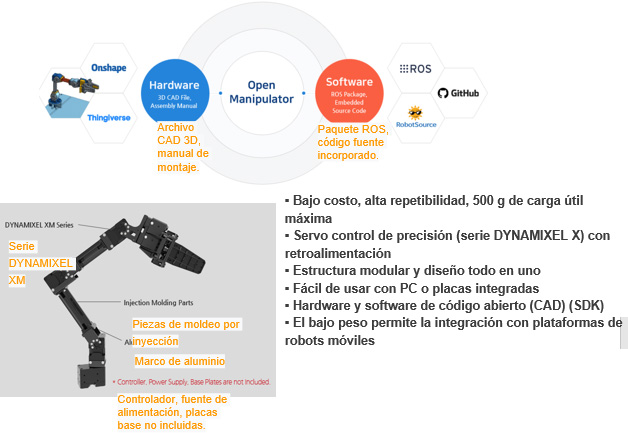
¿Qué es el “OpenManipulator”?
Proporciona CAD de código abierto, software, diseño de hardware y recursos públicos para el desarrollo.
- Bajo costo, alta repetibilidad, 500 g de carga útil máxima.
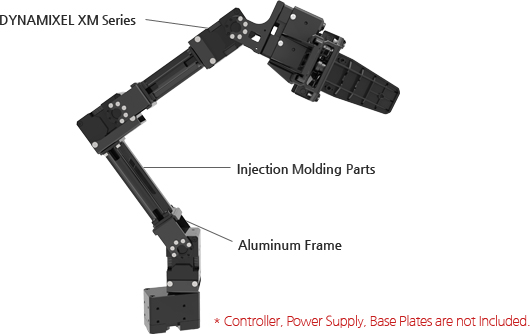
- Servo control de precisión (serie DYNAMIXEL X) con retroalimentación.
- Estructura modular y diseño todo en uno.
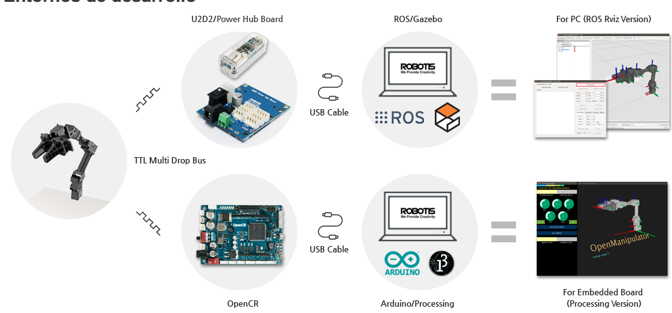
- Fácil de usar con PC o placas integradas.
- Hardware y software de código abierto (CAD) (SDK).
- El bajo peso permite la integración con plataformas de robots móviles.