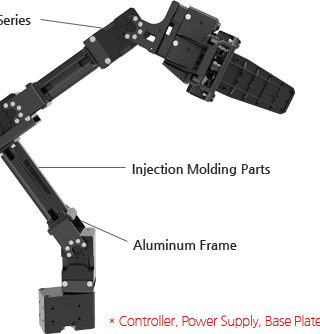



ROBOTIS Robot Hand para Universal Robots e-Series
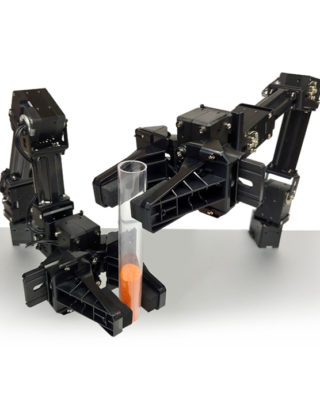
Mano con dos dedos 1-DOF
Mano robot multifuncional con 2 dedos alimentada por un motor DC de 10W.
Diseño de agarre adaptativo
Las juntas pasivas permiten un agarre adaptativo para varias formas de objetos.
Control actual (control de fuerza)
El control de par y el control de posición basado en la corriente permiten recoger objetos de diversos materiales.
Peso ligero y alta potencia
Se entregan 5 kg de carga útil alta de 500 g de mano robótica ligera.
Puntas de dedos desmontables
Las puntas de los dedos desmontables se pueden reemplazar fácilmente con puntas de dedos personalizadas.
Montaje intuitivo y simple
La banda del robot se puede montar rápidamente en ROBOTIS Manipulator.
El diseño simplificado permite un fácil montaje en aplicaciones personalizadas.