
La investigación de Inteligencia Artificial (IA) comienza aquí
Plataforma oficial para la educación ROS
 ROS LA PLATAFORMA MÁS POPULAR DEL MUNDO
ROS LA PLATAFORMA MÁS POPULAR DEL MUNDO
TurtleBot es el robot de código abierto más popular del mundo para educación e investigación.
 COSTO ACCESIBLE
COSTO ACCESIBLE
TurtleBot es la plataforma más asequible para educación e investigación y desarrollo de prototipos.

TAMAÑO PEQUEÑO
Imagina el TurtleBot en tu mochila y llévalo a cualquier parte.

EXTENSIBILIDAD
Es posible expandirse libremente aplicando componentes modulares como varios tipos de SBC, sensores y motores.

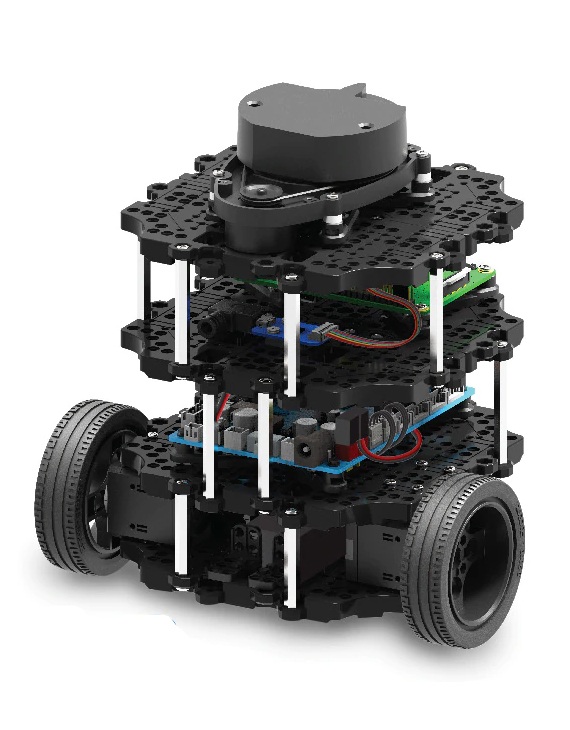
ESTRUCTURA MODULAR
Fácil de montar, mantener, reemplazar y reconfigurar.

SOFTWARE DE CÓDIGO ABIERTO
TurtleBot ofrece una variedad de software de código abierto para los usuarios. Puede modificar el código abierto descargado y compartirlo con sus amigos.

HARDWARE DE CÓDIGO ABIERTO
Los datos esquemáticos, PCB Gerber, BOM y CAD 3D están completamente abiertos al usuario.

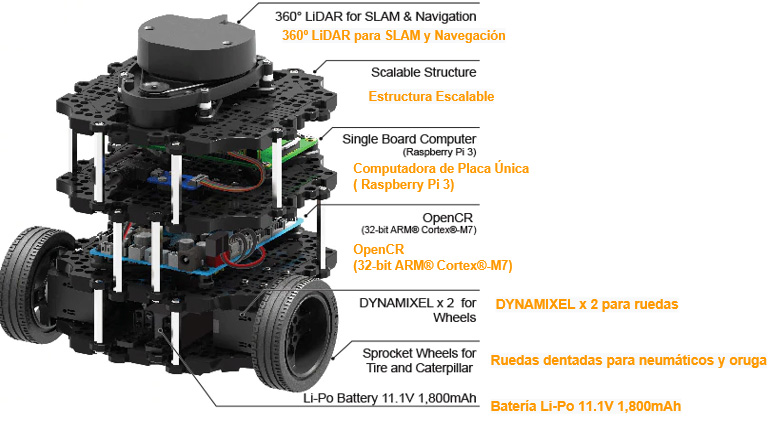
POTENTE LÍNEA DE SENSORES
Cámara Raspberry Pi de alta utilización, LiDAR mejorado de 360 °,
unidad de medición inercial de 9 ejes y codificador preciso para su robot.