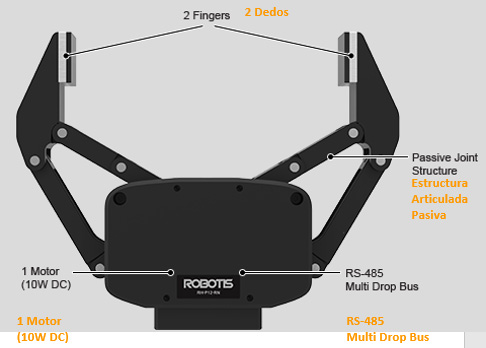
1-DOF Mano con dos dedos.
Diseño de agarre adaptativo.
Control de corriente (control de fuerza).
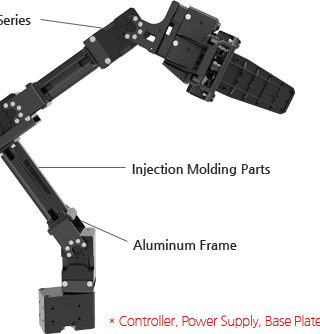
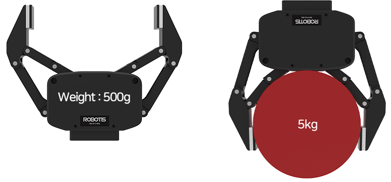
Peso ligero y alta potencia.
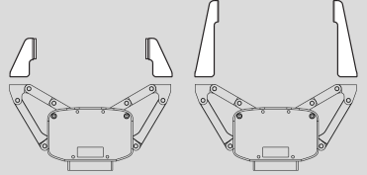
Destacables puntas de los dedos.
Enrutamiento intuitivo y simple.
Protocolo DYNAMIXEL 2.0.
Admite diversos entornos de desarrollo
- Ejemplos de C ++ para Windows, Linux y ROS.
- Soporte a Universal Robots URCap S / W.
Peso ligero y alta potencia
Se entregan 5 kg de carga útil alta de 500 g de mano robótica ligera.
Puntas de dedos desmontables
Las puntas de los dedos desmontables se pueden reemplazar fácilmente con puntas de dedos personalizadas.
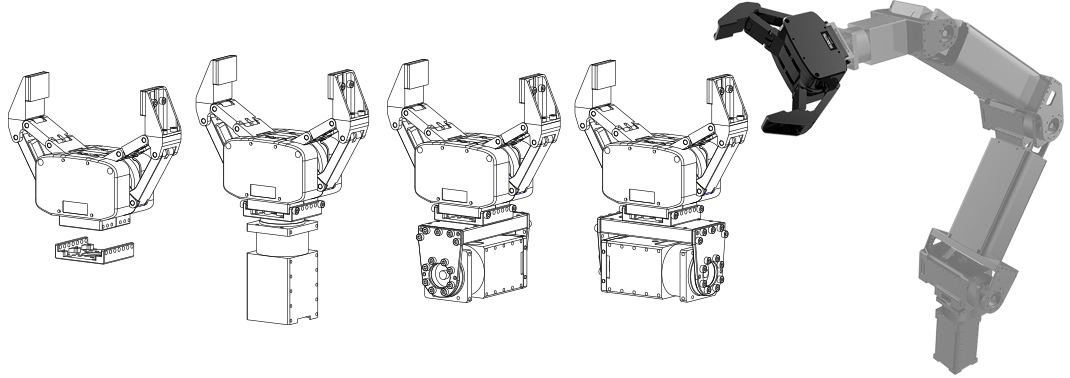
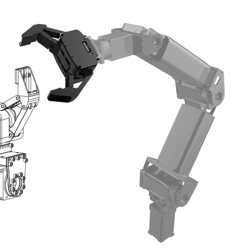
Montaje intuitivo y simple
- El diseño simplificado permite un fácil montaje en aplicaciones personalizadas.
- La mano del robot se puede montar rápidamente en OpenManipulator-P.
Nota: Después de realizada la compra el producto será enviado dentro de un plazo máximo de 21 días.