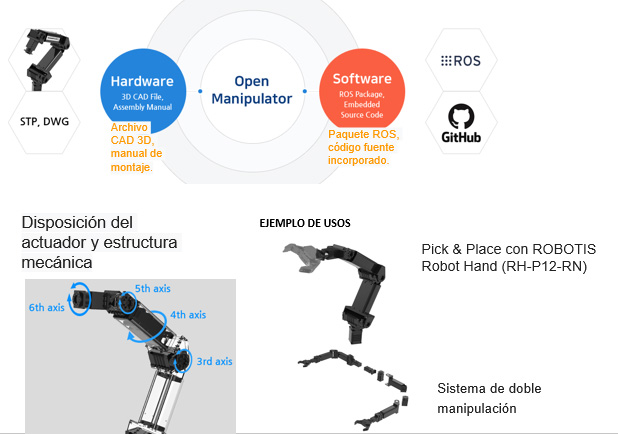



¿Qué es “OpenMANIPULATOR-P”?
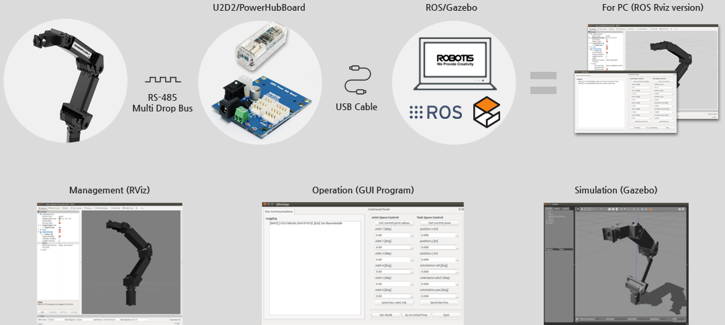
ROBOTIS proporciona CAD de código abierto, software, diseño de hardware y recursos públicos para el desarrollo de brazos manipuladores robóticos.
Experimento de cinemática y dinámica.
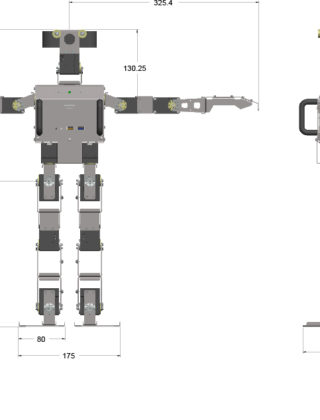
Investiga y diseña un robot de doble brazo.
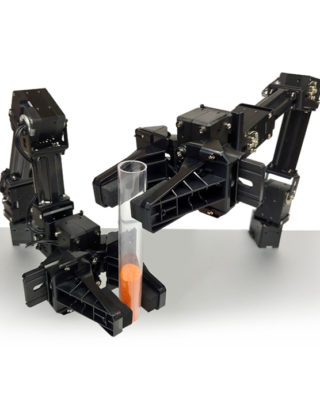
Construir un sistema de robot móvil.
Operación industrial.
Equipo de inspección.
Sistema de entrega a pequeña escala.
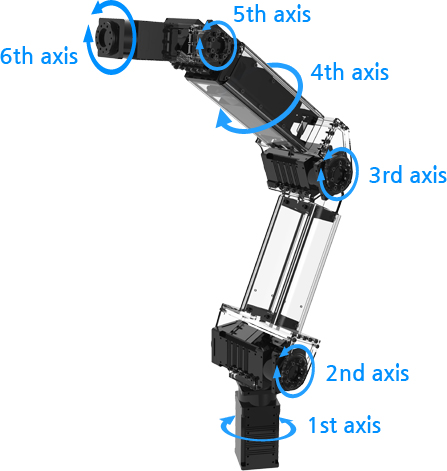
- Sistema de manipulador de código abierto programable por el usuario.
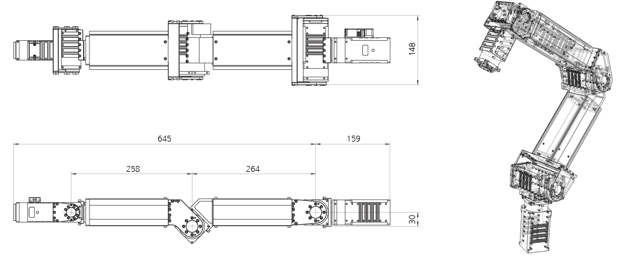
- Plataforma modular para un fácil mantenimiento y personalización.
- Sin caja de control externa y alto peso.